tergelincirnya sabuk atau tali adalah fenomena umum, dalam transmisi gerakan atau kekuatan di antara dua poros. Efek tergelincir adalah untuk mengurangi rasio kecepatan sistem. Secara presisi mesin, di mana rasio kecepatan yang pasti sangat penting (seperti dalam mekanisme arloji), satu-satunya dorongan positif adalah dengan roda gigi atau roda bergigi. Penggerak gigi juga disediakan, kapan jarak antara pengemudi dan pengikut sangat kecil.
-
Kelebihan dan kekurangan
Berikut ini adalah kelebihan dan kekurangannya Penggerak Gigi dibandingkan dengan penggerak lain, misal ikat pinggang, tali dan rantai penggerak :
Keuntungan :
- Ini mentransmisikan rasio kecepatan yang tepat.
- Dapat digunakan untuk mengirimkan daya yang besar.
- Dapat digunakan untuk jarak pusat poros kecil.
- Memiliki efisiensi tinggi.
- Ini memiliki layanan yang dapat diandalkan.
- Memiliki tata letak yang kompak.
Kekurangan:
- Karena pembuatan roda gigi memerlukan khusus alat dan peralatan, oleh karena itu lebih mahal daripada penggerak lain.
- Kesalahan dalam memotong gigi dapat menyebabkan getaran dan kebisingan selama operasi.
- Itu membutuhkan pelumas yang cocok dan metode yang dapat diandalkan untuk menerapkannya, untuk operasi yang tepat pengerak gigi.
Klasifikasi roda Gigi
1.Menurut posisi sumbu poros. Sumbu dari dua poros di mana gerakan harus ditransmisikan, mungkin (a) Paralel, (b) Persimpangan, dan (c) Non-berpotongan dan tidak paralel.
Dua poros paralel dan co-planar yang dihubungkan oleh roda gigi . Roda gigi ini disebut roda gigi dan pengaturan ini dikenal sebagai roda gigi. Roda gigi ini memiliki gigi yang sejajar dengan sumbu roda. Nama lain yang diberikan pada spur gearing adalah helical gearing, di mana gigi cenderung ke sumbu. Roda gigi heliks tunggal dan ganda terhubung poros paralel ditunjukkan pada Gambar. 1 (a) dan (b) masing-masing. Tujuan dari gigi heliks ganda adalah untuk menyeimbangkan dorongan ujung yang diinduksi dalam roda gigi heliks tunggal saat mengirimkan beban. Itu gigi heliks ganda dikenal sebagai gigi herringbone. Sepasang roda gigi pacu secara kinematis setara dengan sepasang cakram silinder, yang dikunci untuk poros paralel yang memiliki kontak garis. Dua poros non-paralel atau berpotongan, tetapi coplaner yang dihubungkan oleh roda gigi diperlihatkan pada Gambar 1 (c). Roda gigi ini disebut roda gigi bevel dan pengaturannya dikenal sebagai roda gigi bevel. Roda gigi bevel, seperti roda gigi taji mungkin juga memiliki gigi mereka condong ke wajah bevel, dalam hal ini mereka dikenal sebagai roda gigi heliks.
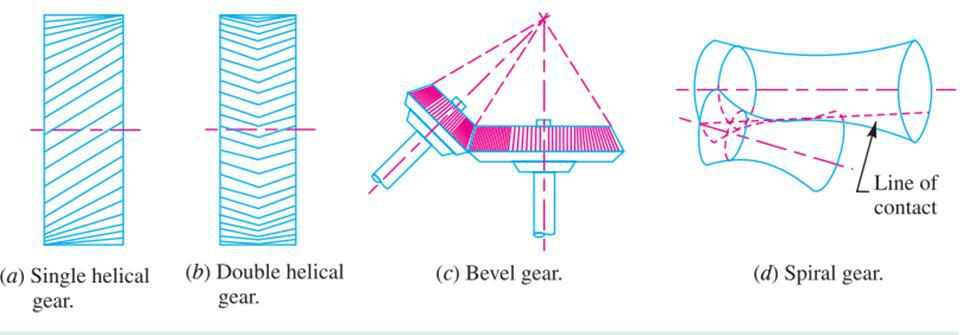
Gambar. 1
Dua poros tidak berpotongan dan tidak paralel yaitu non-coplanar yang dihubungkan oleh roda gigi ditunjukkan pada Gambar 1 (d). Roda gigi ini disebut roda gigi miring atau roda gigi spiral dan susunannya dikenal sebagai roda gigi miring atau roda gigi spiral. Jenis roda gigi ini juga memiliki kontak garis, rotasi yang mengenai sumbu menghasilkan dua permukaan nada yang dikenal sebagai hiperboloid.
Catatan:
- Ketika roda gigi bevel sama (memiliki gigi sama) menghubungkan dua poros yang kapaknya saling tegak lurus, maka roda gigi bevel dikenal sebagai mitre.
- Hiperboloid adalah padatan yang dibentuk dengan memutar garis lurus pada sumbu (bukan pada bidang yang sama), sehingga setiap titik pada garis tetap pada jarak konstan dari sumbu.
- Gearing cacing pada dasarnya adalah bentuk spiral gearing di mana poros biasanya di sudut kanan.
2. Menurut kecepatan perangkat roda gigi. Roda gigi, sesuai dengan kecepatan tepi roda gigi, dapat diklasifikasikan sebagai:(a) Kecepatan rendah, (b) Kecepatan sedang, dan (c) Kecepatan tinggi. Roda gigi yang memiliki kecepatan kurang dari 3 m / s disebut sebagai roda gigi kecepatan rendah dan roda gigi yang memiliki kecepatan antara 3 dan 15 m / s dikenal sebagai roda gigi kecepatan sedang. Jika kecepatan roda gigi lebih dari 15 m / s, maka ini disebut roda gigi kecepatan tinggi.
3. Menurut jenis persneling. Roda gigi, sesuai dengan jenis persneling, dapat diklasifikasikan sebagai:(a) Gearing eksternal, (b) Gearing internal, dan Rack dan pinion.

Gambar 2
Dalam gearing eksternal, persneling dari kedua poros bertautan secara eksternal satu sama lain seperti yang ditunjukkan pada Gambar. 2
(a). Yang lebih besar dari dua roda ini disebut roda taji atau roda gigi dan roda yang lebih kecil disebut pinion. Dalam gearing eksternal, gerakan kedua roda selalu berbeda, seperti yang ditunjukkan pada Gambar. 2 (a). Dalam persneling internal, persneling dari kedua poros bertautan secara internal satu sama lain seperti yang ditunjukkan pada Gambar 2 (b). Yang lebih besar dari dua roda ini disebut roda annular dan roda yang lebih kecil disebut pinion. Dalam gearing internal, gerakan roda selalu seperti yang ditunjukkan pada Gambar. 2 (b). Kadang-kadang, roda gigi poros menyambung secara eksternal dan internal dengan roda gigi dalam * garis lurus, seperti yang ditunjukkan pada Gambar 3. Jenis gigi seperti ini disebut rack and pinion. Itu gigi garis lurus disebut rak dan roda melingkar
disebut pinion. Sedikit pertimbangan akan menunjukkan bahwa dengan bantuan rak dan pinion, kita dapat mengubah gerak linier menjadi gerakan putar dan sebaliknya seperti yang ditunjukkan pada Gambar 3.

Gambar. 28.5 rak dan pinion
4. Menurut posisi gigi pada permukaan gigi. Gigi pada permukaan gigi dapat berupa (a) Lurus, (b) Miring, dan (c) Melengkung.
Kita telah membahas sebelumnya bahwa gigi taji memiliki gigi lurus sedangkan gigi heliks memiliki gigi cenderung ke pelek roda. Dalam hal roda gigi spiral, gigi melengkung di atas permukaan pelek.
Sumber : Gupta, R. K. J. (1982). Machine Design Mks & Si Units. Ram Nagar, New Delhi.